
设λ,λ'分别表示一维基本形的一对对应元素A +λB与A+λ'B的非齐次坐标参数,则变换式 2λλ'+3λ+6λ'+9=0是一个一维射影变换。
题目
设λ,λ'分别表示一维基本形的一对对应元素A +λB与A+λ'B的非齐次坐标参数,则变换式 2λλ'+3λ+6λ'+9=0是一个一维射影变换。
相似考题
更多“设λ,λ'分别表示一维基本形的一对对应元素A +λB与A+λ'B的非齐次坐标参数,则变换式 2λλ'+3λ+6λ'+9=0是一个一维射影变换。”相关问题
-
第1题:
设二次型
 (b>0),
(b>0),
其中二次型的矩阵A的特征值之和为1,特征值之积为-12.
(1)求a,b的值;
(2)利用正交变换将二次型f化为标准形,并写出所用的正交变换和对应的正交矩阵.答案:解析:
-
第2题:
如 ,点A,B,O,的坐标分别为(4,0),(0,3),(0,0),若(x,y)是三角形AOB中的点,则2x+3y的最大值为( )A.6
,点A,B,O,的坐标分别为(4,0),(0,3),(0,0),若(x,y)是三角形AOB中的点,则2x+3y的最大值为( )A.6
B.7
C.8
D.9
E.12答案:D解析: -
第3题:
不同平面坐标系统间常采用相似变换,其变换一般需要转换参数,求解转换参数的个数以及至少需要公共点坐标的个数是()A:4,2
B:4,4
C:3,3
D:2,2答案:A解析:平面坐标系统的相似变换需要ΔX,ΔY,m(尺度参数),α(旋转角)四个参数。而需要两个公共点坐标就可以求解四个参数。 -
第4题:
空间坐标变换中的正交变换矩阵的()个元素中只有()个独立元素。
正确答案:9;3 -
第5题:
齐次坐标提供了坐标系变换的有效方法,但仍然无法表示无穷远的点。
正确答案:错误 -
第6题:
将坐标(2,3)以(1,1)为中心放大3倍,再针对坐标原点做对称变换,最终变换结果为()
- A、(4,7,1)
- B、(6,9,1)
- C、(-4,-7,1)
- D、(-6,-9,1)
正确答案:C -
第7题:
点P的齐次坐标为(8,6,2),其对应的空间坐标为()。
- A、(8,6,2)
- B、(8,6)
- C、(4,3,1)
- D、(4,3)
正确答案:D -
第8题:
洛仑兹坐标变换是伽利略坐标变换式在高速情况下的近似。
正确答案:错误 -
第9题:
判断题齐次坐标提供了坐标系变换的有效方法,但仍然无法表示无穷远的点。A对
B错
正确答案: 对解析: 暂无解析 -
第10题:
填空题从平面上点的齐次坐标,经齐次坐标变换,最后转换为平面上点的坐标,这一变换过程称为()。正确答案: 规范化过程解析: 暂无解析 -
第11题:
问答题机器人的运动如何用齐次坐标变换来表示?正确答案: 机器人个关节的运动是坐标运动,坐标运动可以用齐次坐标变换来表示。机器人的运动可用运动后的坐标系相对于运动前坐标系的齐次坐标变换矩阵来表示。解析: 暂无解析 -
第12题:
单选题不同平面坐标系统间常采用相似变换,其变换一般需要转换参数,求解转换参数的个数以及至少需要公共点坐标的个数是()。A4、2
B4、4
C3、3
D2、2
正确答案: C解析: 暂无解析 -
第13题:
设二次型f(x1,x2,x3)= (a>0)的秩为2.(1)求a;(2)用正交变换法化二次型为标准形.答案:解析:
(a>0)的秩为2.(1)求a;(2)用正交变换法化二次型为标准形.答案:解析: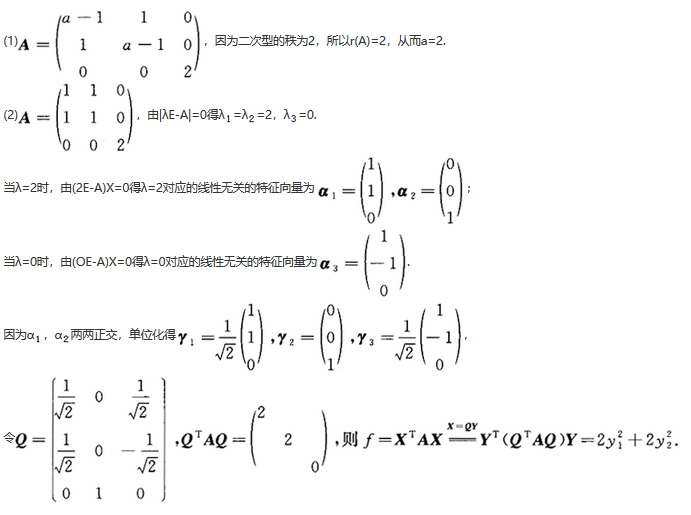
-
第14题:
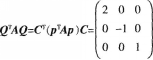
设二次型f(x1,x2,x3)在正交变换为x=py下的标准形为 若Q=(e1-e3,e2),则f(x1,x2,x3)在正交变换x=Qy下的标准型为( )。
若Q=(e1-e3,e2),则f(x1,x2,x3)在正交变换x=Qy下的标准型为( )。
A.
B.
C.
D. 答案:A解析:
答案:A解析:

-
第15题:
不同大地坐标系统间进行相似变换,实现这一变换需要求解转换参数,平面坐标系统间转换求解转换参数的个数以及至少需要的公共点的个数分别是()。A:2,2
B:2,4
C:4,4
D:4,2答案:D解析:平面坐标系统的相似变换需要求解2个平移量(△x、△y)、1个旋转角a和1个缩放比K共4个参数,每个平面公共点依坐标(x、y)可列2个方程,求解4个参数至少需要4个方程,因此需要的公共点数为2个。三维坐标转换求解7个转换参数(3个平移量、3个旋转角和1个缩放比),至少需要3个公共点。故选D。 -
第16题:
二维图形变换使用了齐次坐标表示法,其变换矩阵是()。
- A、2×2矩阵
- B、3×3矩阵
- C、4×4矩阵
- D、5×5矩阵
正确答案:B -
第17题:
在齐次坐标系中,若用矩阵来表示各种运算,则比例和旋转变换是矩阵乘法运算,而平移变换是矩阵加法运算。
正确答案:错误 -
第18题:
从平面上点的齐次坐标,经齐次坐标变换,最后转换为平面上点的坐标,这一变换过程称为()。
正确答案:规范化过程 -
第19题:
不同平面坐标系统间常采用相似变换,其变换一般需要转换参数,求解转换参数的个数以及至少需要公共点坐标的个数是()。
- A、4、2
- B、4、4
- C、3、3
- D、2、2
正确答案:A -
第20题:
填空题空间坐标变换中的正交变换矩阵的()个元素中只有()个独立元素。正确答案: 9,3解析: 暂无解析 -
第21题:
单选题将坐标(2,3)以(1,1)为中心放大3倍,再针对坐标原点做对称变换,最终变换结果为()A(4,7,1)
B(6,9,1)
C(-4,-7,1)
D(-6,-9,1)
正确答案: A解析: 暂无解析 -
第22题:
判断题在齐次坐标系中,若用矩阵来表示各种运算,则比例和旋转变换是矩阵乘法运算,而平移变换是矩阵加法运算。A对
B错
正确答案: 对解析: 暂无解析 -
第23题:
单选题不同平面坐标系统间常采用相似变换,其变换一般需要转换参数,求解4参数的转换参数至少需要公共点的个数是( )。A2
B3
C4
D5
正确答案: B解析: -
第24题:
单选题二维图形变换使用了齐次坐标表示法,其变换矩阵是()。A2×2矩阵
B3×3矩阵
C4×4矩阵
D5×5矩阵
正确答案: D解析: 暂无解析