
下列哪种说法正确是?( )A.开环稳定的系统,其闭环系统一定稳定B.开环不稳定的系统,其闭环一定不稳定C.开环稳定的系统,其闭环系统不一定稳定D.开环稳定的系统,其闭环一定不稳定A.B.C.D.
题目
下列哪种说法正确是?( )
A.开环稳定的系统,其闭环系统一定稳定
B.开环不稳定的系统,其闭环一定不稳定
C.开环稳定的系统,其闭环系统不一定稳定
D.开环稳定的系统,其闭环一定不稳定
A.
B.
C.
D.
相似考题
更多“下列哪种说法正确是?()A.开环稳定的系统,其闭环系统一定稳定B.开环不稳定的系统,其闭环一定不稳 ”相关问题
-
第1题:
若系统开环稳定,则系统闭环不一定稳定。()
参考答案:正确
-
第2题:
下列哪种说法正确?( )A.开环稳定的系统,其闭环系统一定稳定
B.开环不稳定的系统,其闭环一定不稳定
C.开环稳定的系统,其闭环系统不一定稳定
D.开环稳定的系统,其闭环一定不稳定答案:C解析:开环系统稳定(P=0),闭环系统稳定的充要条件为N=0,即开环幅相特性曲线不包围(-1,j0)点;开环不稳定的系统(P≠0),其闭环系统稳定的充要条件为N=P/2,即开环幅相特性曲线逆时针包围(-1,j0)点P/2圈。因此开环不稳定的系统,其闭环不一定不稳定;开环稳定的系统,其闭环不一定稳定。 -
第3题:
根据开环传递函数的对数坐标图判断其闭环系统的稳定性。( )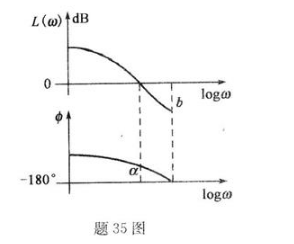 A. 系统稳定,增益裕量为a
A. 系统稳定,增益裕量为a
B. 系统稳定,增益裕量为b
C. 系统不稳定,负增益裕量为a
D. 系统不稳定,负增益裕量为b答案:B解析:如题35解图所示。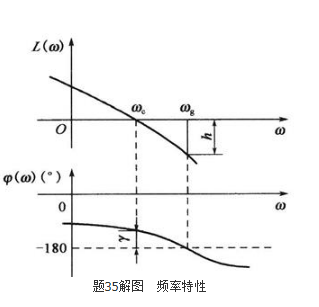
根据解析图可知,
在数坐标图(伯德图)中,相角裕度表现为L(ωc)=0dB处的相角φ(ωc)与﹣180。水平线之间的角度差γ。对于题中所示的稳定系统,其对数幅值裕度h>0dB,相角裕度为正值,即γ>0。因此解析图中,幅值裕度(增益裕度)为b>0,相角裕度为a>0,该系统稳定。 -
第4题:
开环稳定,闭环();开环不稳定,闭环()。
正确答案:不稳定;稳定 -
第5题:
开环稳定闭环不一定是稳定的;开环不稳定闭环也不稳定。
正确答案:错误 -
第6题:
开环系统与闭环系统最本质的区别是()。
- A、开环系统的输出对系统无控制作用,闭环系统的输出对系统有控制作用
- B、开环系统的输入对系统无控制作用,闭环系统的输入对系统有控制作用
- C、开环系统不一定有反馈回路,闭环系统有反馈回路
- D、开环系统不一定有反馈回路,闭环系统也不一定有反馈回路
正确答案:A -
第7题:
将下列判断中正确者的编号填入题后括号()。
- A、如果系统开环稳定,则闭环一定稳定
- B、如果系统闭环稳定,则开环一定稳定
- C、如果系统开环稳定,则闭环稳定的条件是闭环奈氏曲线不包围(-1,j0)点
- D、如果系统开环稳定,则闭环稳定的条件是开环奈氏曲线不包围(-1,j0)点
正确答案:D -
第8题:
系统开环不稳定闭环一定不稳定。
正确答案:错误 -
第9题:
若系统无开环右极点且其开环极座标曲线只穿越实轴上区间(-1,+∞),则该闭环系统一定()
- A、稳定
- B、临界稳定
- C、不稳定
- D、不一定稳定
正确答案:A -
第10题:
判断题当闭环系统开环放大系数大于系统的临界放大系数时,系统将不稳定。A对
B错
正确答案: 错解析: 暂无解析 -
第11题:
单选题闭环系统一定稳定的条件是()A开环极点均为负
B开环极点均为正
C闭环极点均为负
D闭环极点均为正
正确答案: A解析: 暂无解析 -
第12题:
填空题开环稳定,闭环();开环不稳定,闭环()。正确答案: 不稳定,稳定解析: 暂无解析 -
第13题:
一般对于闭环.开环和半闭环控制系统,其产品由低到高的排序为:()
A.闭环.半闭环.开环
B.半闭环.闭环.开环
C.半闭环.开环.闭环
D.开环.半闭环.闭环
正确答案:D
-
第14题:
下列概念中错误的是( )。
A. 闭环控制系统精度通常比开环系统高
B. 开环系统不存在稳定性问题
C. 反馈可能引起系统振荡
D. 闭环系统总是稳定的答案:D解析:闭环控制系统的优点是具有自动修正输出量偏差的能力、抗干扰性能好、控制精度高;缺点是结构复杂,如设计不好,系统有可能不稳定。开环控制系统的优点是结构简单易实现、价格便宜、容易维修;主要缺点是精度低,容易受环境变化的干扰影响,没有自动补偿各种扰动及自身特性参数变化对系统输出量影响的能力,适用于控制精度要求不高的场合。 -
第15题:
下列概念中错误的是()。A.闭环控制系统的精度通常比开环系统高
B.开环系统不存在稳定性问题
C.反馈可能引起系统振荡
D.闭环系统总是稳定的答案:D解析:闭环控制系统的优点:具有自动修正输出量偏差的能力,抗干扰性能好,控制精度高;缺点:结构复杂,如果设计不好,系统有可能不稳定。 -
第16题:
关于系统零极点位置对系统性能的影响,下列观点中正确的是()
- A、如果闭环极点全部位于S左半平面,则系统一定是稳定的。稳定性与闭环零点位置无关;
- B、如果闭环系统无零点,且闭环极点均为负实数极点,则时间响应一定是衰减振荡的;
- C、超调量仅取决于闭环复数主导极点的衰减率,与其它零极点位置无关;
- D、如果系统有开环极点处于S右半平面,则系统不稳定。
正确答案:A -
第17题:
当闭环系统开环放大系数大于系统的临界放大系数时,系统将不稳定。
正确答案:正确 -
第18题:
关于线性系统稳定性的判定,下列观点正确的是()。
- A、线性系统稳定的充分必要条件是:系统闭环特征方程的各项系数都为正数;
- B、无论是开环极点或是闭环极点处于右半S平面,系统不稳定;
- C、如果系统闭环系统特征方程某项系数为负数,系统不稳定;
- D、当系统的相角裕度大于零,幅值裕度大于1时,系统不稳定。
正确答案:C -
第19题:
开环系统的频率特性与闭环系统的时间响应有关。开环系统的低频段表征闭环系统的稳定性;开环系统的中频段表征闭环系统的动态性能;开环系统的高频段表征闭环系统的()。
正确答案:抗干扰能力 -
第20题:
系统开环稳定闭环一定稳定。
正确答案:错误 -
第21题:
闭环系统一定稳定的条件是()
- A、开环极点均为负
- B、开环极点均为正
- C、闭环极点均为负
- D、闭环极点均为正
正确答案:C -
第22题:
单选题若系统无开环右极点且其开环极座标曲线只穿越实轴上区间(-1,+∞),则该闭环系统一定()A稳定
B临界稳定
C不稳定
D不一定稳定
正确答案: D解析: 暂无解析 -
第23题:
单选题开环系统与闭环系统最本质的区别是()。A开环系统的输出对系统无控制作用,闭环系统的输出对系统有控制作用
B开环系统的输入对系统无控制作用,闭环系统的输入对系统有控制作用
C开环系统不一定有反馈回路,闭环系统有反馈回路
D开环系统不一定有反馈回路,闭环系统也不一定有反馈回路
正确答案: D解析: 暂无解析