
进程Pl、P2、P3、P4、P5和P6的前趋图如下图所示:若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(23);空③和空④处应分别为(24);空⑤和空⑥处应分别为(25)。A.V (S3)和V (S5) V (S6) B.P (S3)和V (S5) V (S6) C.V (S3)和P (S5) P (S6) D.P (S3)和P (S5) P (S6)(22)
题目
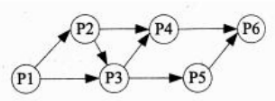
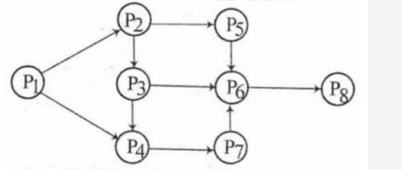
进程Pl、P2、P3、P4、P5和P6的前趋图如下图所示:
若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(23);空③和空④处应分别为(24);空⑤和空⑥处应分别为(25)。

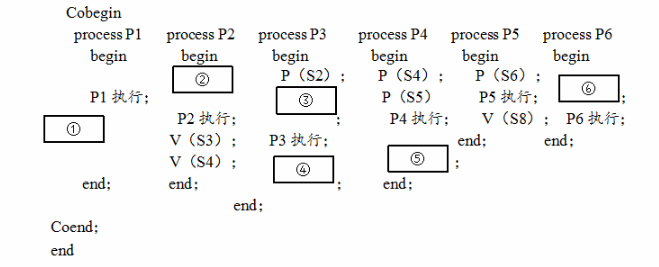
若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(23);空③和空④处应分别为(24);空⑤和空⑥处应分别为(25)。
A.V (S3)和V (S5) V (S6)
B.P (S3)和V (S5) V (S6)
C.V (S3)和P (S5) P (S6)
D.P (S3)和P (S5) P (S6)(22)
B.P (S3)和V (S5) V (S6)
C.V (S3)和P (S5) P (S6)
D.P (S3)和P (S5) P (S6)(22)
相似考题
更多“进程Pl、P2、P3、P4、P5和P6的前趋图如下图所示: ”相关问题
-
第1题:
有5个进程P1,P2,P3,P4,P5,它们几乎同时进入就绪队列,它们的优先数和需要的处理器时间如下表所示。假设优先数小的优先级高,忽略进行调度等所花费的时间。

采用“不可剥夺优先数”调度算法,进程执行的次序是________。
A.P2、P1、P5、P3、P4
B.P2、P4、P5、P3、P1
C.P4、P1、P3、P5、P2
D.P4、P3、P1、P5、P2
正确答案:B
解析:对每个进程确定一个优先数,进程调度总是选择具有最高优先数的进程来占用处理器。为了调度方便,就绪队列中进程可按优先数从大到小排列,当有进程就绪时,根据它的优先数插入到队列中的适当位置。这样,进程调度也总是把处理器分配给就绪队列中的第一个进程。如果进程具有相同的优先数,则对这些具有相同优先级进程再按先来先服务的次序分配处理器。 “不可剥夺方式”是指一旦把CPU分配给一个进程,它就一直占用CPU,直到该进程自己因调用原语操作或等待I/O而进入阻塞状态,或时间片用完才让出CPU,重新执行进程调度。 -
第2题:
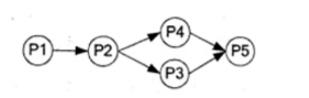
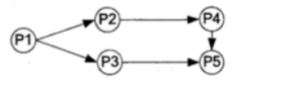
进程P1、P2、P3、P4和P5的前趋图如下所示:
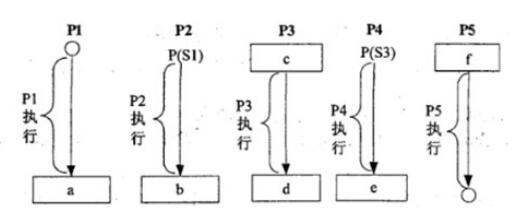
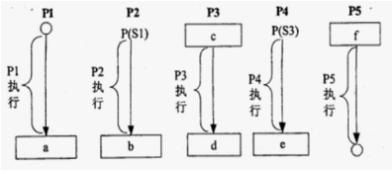
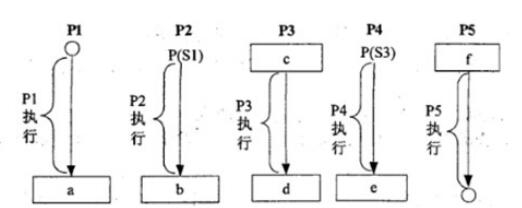
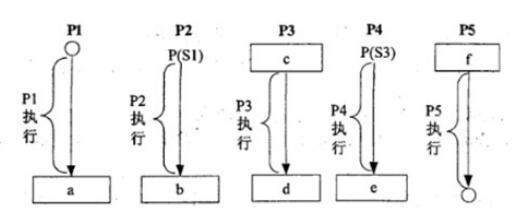
若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,需要设置5个信号量S1、S2、S3、S4和S5,且信号量S1~S5的初值都等于零。如下的进程执行图中a和b处应分别填写 ( ) ;c和d处应分别填写 ( ) ;e和f处应分别填写 (请作答此空) 。 A.P(S4)和V(S5)
A.P(S4)和V(S5)
B.V(S5)和P(S4)
C.V(S4)和P(S5)
D.V(S4)和V(S5)答案:A解析:图中有五条箭线,因此需要设置五个信号量,按照从小到大的顺序分别是:P1→P2是S1,P2→P3是S2,P2→P4是S3,P3→P4是S4,P4→P5是S5。每个进程开始的时候执行P操作(P1没有P操作,只有V操作),结束的时候执行V操作,如P2开始的时候执行P(S1)的操作,结束时执行V(S2)的操作。其他同理。 -
第3题:
进程P1、P2、P3、P4和P5的前趋图如下所示:
若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1、S2、S3、S4和S5,且信号量S1~S5的初值都等于零。下图中a、b和c处应分别填写( );d和e处应分别填写(请作答此空),f和g处应分别填写( )。 A. V(S2)和P(S4)
A. V(S2)和P(S4)
B. P(S2)和V(S4)
C. P(S2)和P(S4)
D. V(S2)和V(S4)答案:B解析:试题的正确的答案为B。根据前驱图,P3进程运行前需要等待P2进程的结果,故需执行程序前要先利用1个P操作,根据排除法可选项只有选项B和选项C。又因为P3进程运行结束后需要利用1个V操作通知P5进程,根据排除法可选项只有选项B满足要求。 -
第4题:
假设系统中有三类互斥资源R1、R2和R3,可用资源数分别为9、8和5。在To时刻系统中有P1、P2、P3、P4和P5五个进程,这些进程对资源的最大需求量和已分配资源数如下表所示。如果进程按( )序列执行,那么系统状态是安全的。 A.P1→P2→P4→P5→P3
A.P1→P2→P4→P5→P3
B.P2→P1→P4→P5→P3
C.P2→P4→P5→P1→P3
D.P4→P2→P4→P1→P3答案:C解析: -
第5题:
进程P1、P2、P3、P4和P5的前趋图如下图所示:

若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1.S2.S3.S4和S5,且信号量S1~S5的初值都等于零。下图中a和b处应分别填写(请作答此空);c和d处应分别填写( ),e和f处应分别填写( )。
 A. V(S1)、P(S2)和V(S3)
A. V(S1)、P(S2)和V(S3)
B. P(S1)、V(S2)和V(S3)
C. V(S1)、V(S2)和V(S3)
D. P(S1)、P(S2)和V(S3)答案:C解析:根据前驱图,P1进程执行完需要通知P2和P3进程,故需要利用V(S1)V(S2)操作通知P2和P3进程,所以空a应填V(S1)V(S2);P2进程执行完需要通知P4进程,所以空b应填V(S3)。根据前驱图,P3进程运行前需要等待P1进程的结果,故需执行程序前要先利用1个P操作,而P3进程运行结束需要通知P5进程。根据排除法可选项只有选项B和选项C。又因为P3进程运行结束后需要利用1个V操作通知P5进程,根据排除法可选项只有选项B满足要求。根据前驱图,P4进程执行结束需要利用1个V操作通知P5进程,故空e处需要1个V操作;P5进程执行前需要等待P3和P4进程的结果,故空f处需要2个P操作。根据排除法可选项只有选项B和选项C能满足要求。根据试题(27)分析可知,P3进程运行结束是利用V(S4)通知P5进程,故P4进程运行结束是利用V(S5)通知P5进程。 -
第6题:
6进程P1、P2、P3、P4和P5的前趋图如下所示:

若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1、S2、S3、S4、S5,且信号量S1~S5的初值都等于零。下图中a和b分别应填写( )。
 A.V(S1)P(S2)和V(S3)
A.V(S1)P(S2)和V(S3)
B.P(S1)V(S2)和V(S3)
C.V(S1)V(S2)和V(S3)
D.P(S1)P(S2)和V(S3)答案:C解析:参考课程有关内容。1、先在图中标注信号量 2、遵循P前面的信号量,V后面的信号量的原则 -
第7题:
进程Pl、P2、P3、P4、P5和P6的前趋图如下图所示:若用PV操作控制这5个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(请作答此空 );空③和空④处应分别为( );空⑤和空⑥处应分别为( )。
若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(23);空③和空④处应分别为(24);空⑤和空⑥处应分别为(25)。
 A.V (S1) V (S2)和P (S2)
A.V (S1) V (S2)和P (S2)
B.P (S1) P (S2)和V (S2)
C.V (S1) V (S2)和P (S1)
D.P (S1) P (S2)和V (S1)答案:C解析:图中有八条箭线,因此,需要设置八个信号量。按照从小到大的顺序分别是:P1→P2对应S1,P1→P3对应S2,P2→P3对应S3,P2→P3对应S3,P2→P4对应S4,P3→P4对应S5,P3→P5对应S6,P4→P6对应S7,P5→P6对应S8。每个进程开始的时候执行P操作(P1没有P操作,只有V操作),结束的时候执行V操作。例如,P2开始的时候执行P(S1)的操作,结束时执行V(S3)和V(S4)的操作,P3开始的时候执行P(S2)P(S3)的操作,结束时执行V(S5)和V(S6)的操作,其他同理。 -
第8题:
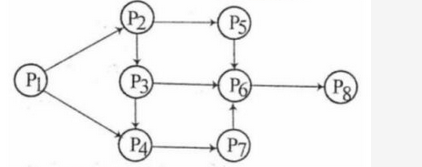
进程P1、P2、P3、P4、P5和P6的前趋图如下所示:
若用PV操作控制这6个进程的同步与互斥的程序如下,空f和空g处应分别为(48)。 A.V(S5)和V(S7)
A.V(S5)和V(S7)
B.P(5)和P(S7)
C.P(S5)和V(S7)
D.V(S5)和P(S7)答案:C解析:对于试题(48),根据前驱图P5进程开始运行前必须等待P3进程的通知,需要用P (S5)操作测试P3进程是否运行完,故空f应填写P (S5):P5进程运行结束需要利用V操作通知P6进程,故空g应填写V(S7)。 -
第9题:
前趋图是一个有效无环图,记为→={pi,pj,pi完成时间先于pj开始时间}。假设系统中进P={p1,p2,p3,p4,p5,p6,p7,p8},且进程的前趋图如下。那么该前驱图可记为(请作答此空)图中( )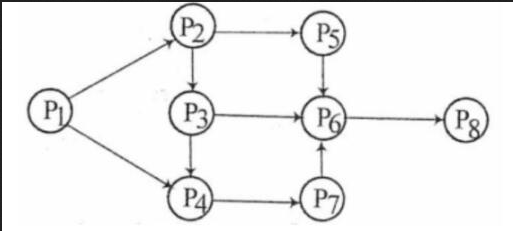 A.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P8)
A.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P8)
B.→={(P1,P2),(P1,P4),(P2,P3),(P2,P5),(P3,P4),(P3,P6),(P4,P7),(P5,P6),(P6,P8),(p7,p6)}
C.→={(P1,P2),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P6),(P4,P7),(P6,P8),(p7,p8)}
D.→={(P1,P2),(P1,P3),(P2,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P5),(P4,P7),(P6,P8),(p7,p8)}答案:B解析:本题考查前趋图相关知识。前趋图标记规则:从小到大。使用排除法,解题思路如下:1)A选项,(P5,P8)不存在,排除2)C选项,(P2,P3)缺失,排除3)D选项,(P2,P4)不存在,排除4)只剩下B选项,经检验,正确。观察B选项,共有10对前驱关系,P1为初始节点,P8为终止节点。 -
第10题:
进程P1、P2、P3、P4、P5和P6的前趋图如下所示: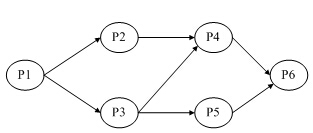
若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空a、空b和空c处应分别为(46)。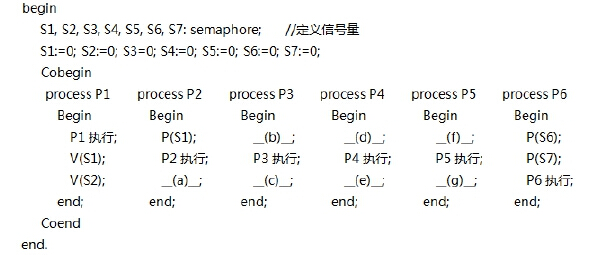 A.V(S3)、P(S2)和V(S4)V(S5)
A.V(S3)、P(S2)和V(S4)V(S5)
B.P(S3)、P(S2)和V(S4)V(S5)
C.V(S2)、P(S3)和P(S4)P(S3)
D.V(S2)、V(S3)和P(S3)P(S4)答案:A解析:对于试题(46),根据前驱图P2进程需要等待P1进程的通知,故需要利用P (S1) 操作测试P1进程是否运行完,P2进程运行结束需要利用V操作分别通知P4进程,所以空a应填V (S2)用以通知P4进程可以执行:前驱图P3进程开始运行前必须等待P1 进程的通知,需要用P操作测试P1进程是否运行完,所以空b应填P (S2)操作测试P1进程是否运行完;P3进程运行结束需要利用V (S4) V (S5)操作通知P4和P5进程可以开始运行,故空c应填V (S4) V (S5)。 -
第11题:
前趋图是一个有效无环图,记为-={pi,pj,pi完成时间先于pj开始时间}。假设系统中进P={p1,p2,p3,p4,p5,p6,p7,p8},且进程的前趋图如下。那么该前驱图可记为( )图中(请作答此空)
 A.存在着十个前驱关系。p1为初始节点。p2p4为终止节点。
A.存在着十个前驱关系。p1为初始节点。p2p4为终止节点。
B.存在着两个前驱关系。p6为初始节点,p2p4为终止节点。
C.存在着九个前驱关系。p6为初始节点,p8为终止节点。
D.存在着十个前驱关系。p6为初始节点,p8为终止节点。答案:D解析:本题考查前趋图相关知识。前趋图标记规则:从小到大。使用排除法,解题思路如下:1)A选项,(P5,P8)不存在,排除2)C选项,(P2,P3)缺失,排除3)D选项,(P2,P4)不存在,排除4)只剩下B选项,经检验,正确。观察B选项,共有10对前驱关系,P1为初始节点,P8为终止节点。 -
第12题:
前趋图(Precedence Graph) 是一个有向无环图,记为:→={(Pi,Pj )|Pi must complete before Pj may strat}。假设系统中进程P={P1,P2,P3,P4,P5,P6,P7,P8},且进程的前驱图如下:那么前驱图可记为:( )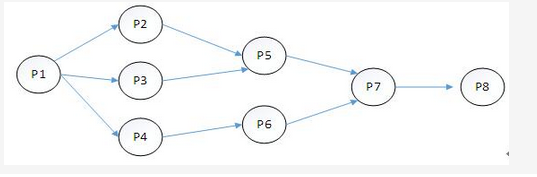 A. →={(P2,P1),(P3,P1),(P4,P1),(P6,P4),(P7,P5),(P7,P6),(P8,P7)}
A. →={(P2,P1),(P3,P1),(P4,P1),(P6,P4),(P7,P5),(P7,P6),(P8,P7)}
B. →={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P5,P7),(P6,P7),(P7,P8)}
C. →={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P5),(P4,P6),(P5,P7),(P6,P7),(P7,P8)}
D. →={(P2, P1), (P3,P1),(P4,P1),(P5,P2),(P5,P2),(P5,P3),(P6,P4),(P7,P5), (P7,P6),(P8,P7)}答案:C解析:前趋图表述,→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P5),(P4,P6),(P5,P7),(P6,P7),(P7,P8)} -
第13题:
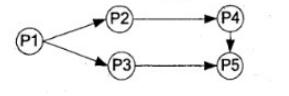
进程P1、P2、P3、P4、P5的前趋关系图如下所示:


若用PV操作控制这5个进程的同步与互斥,程序如下: 程序中空a和空b处应分别为(48),空c和空d处应分别为(49);空e和空f处应分别为(50)。

A.A
B.B
C.C
D.D
正确答案:B
根据前驱图,P2进程需要等待Pl进程的通知,故需要利用P(SI)操作测试P1进程是否运行完,P2进程运行结束需要利用V操作分别通知P3和P4进程,所以用V(S2)操作通知P3进程,用V(S3)操作通知P4进程。根据前驱图,P3进程开始运行前必须等待P2和P4进程的通知,需要用P(S2)操作测试P2进程是否运行完,用P(S4)操作测试P4进程是否运行完,P2进程运行结束需要利用V(s5)操作通知P5进程。根据前驱图,P4进程开始运行前必须等待P2进程的通知,需要用P(S3)操作测试P2进程是否运行完,故空e应填写P(S3)。P4进程运行结束需要利用V操作通知P3和P5进程,故空g应填写V(S4)V(S6)。 -
第14题:
进程P1、P2、P3、P4和P5的前趋图如下所示:
若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,需要设置5个信号量S1、S2、S3、S4和S5,且信号量S1~S5的初值都等于零。如下的进程执行图中a和b处应分别填写 (请作答此空) ;c和d处应分别填写 ( ) ;e和f处应分别填写 ( ) 。 A.V(S1)和P(S2)V(S3)
A.V(S1)和P(S2)V(S3)
B.P(S1)和V(S2)V(S3)
C.V(S1)和V(S2)V(S3)
D.P(S1)和P(S2)V(S3)答案:B解析:图中有五条箭线,因此需要设置五个信号量,按照从小到大的顺序分别是:P1→P2是S1,P2→P3是S2,P2→P4是S3,P3→P4是S4,P4→P5是S5。每个进程开始的时候执行P操作(P1没有P操作,只有V操作),结束的时候执行V操作,如P2开始的时候执行P(S1)的操作,结束时执行V(S2)的操作。其他同理。 -
第15题:
进程P1、P2、P3、P4和P5的前趋图如下图所示:
若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1.S2.S3.S4和S5,且信号量S1~S5的初值都等于零。下图中a和b处应分别填写( );c和d处应分别填写(请作答此空),e和f处应分别填写( )。
 A. P(S2)和P(S4)
A. P(S2)和P(S4)
B. P(S2)和V(S4)
C. V(S2)和P(S4)
D. V(S2)和V(S4)答案:B解析:根据前驱图,P1进程执行完需要通知P2和P3进程,故需要利用V(S1)V(S2)操作通知P2和P3进程,所以空a应填V(S1)V(S2);P2进程执行完需要通知P4进程,所以空b应填V(S3)。根据前驱图,P3进程运行前需要等待P1进程的结果,故需执行程序前要先利用1个P操作,而P3进程运行结束需要通知P5进程。根据排除法可选项只有选项B和选项C。又因为P3进程运行结束后需要利用1个V操作通知P5进程,根据排除法可选项只有选项B满足要求。根据前驱图,P4进程执行结束需要利用1个V操作通知P5进程,故空e处需要1个V操作;P5进程执行前需要等待P3和P4进程的结果,故空f处需要2个P操作。根据排除法可选项只有选项B和选项C能满足要求。根据试题(27)分析可知,P3进程运行结束是利用V(S4)通知P5进程,故P4进程运行结束是利用V(S5)通知P5进程。
-
第16题:
进程P1、P2、P3、P4和P5的前趋图如下图所示:

若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1.S2.S3.S4和S5,且信号量S1~S5的初值都等于零。下图中a和b处应分别填写( );c和d处应分别填写( ),e和f处应分别填写(请作答此空)。
 答案:B解析:根据前驱图,P1进程执行完需要通知P2和P3进程,故需要利用V(S1)V(S2)操作通知P2和P3进程,所以空a应填V(S1)V(S2);P2进程执行完需要通知P4进程,所以空b应填V(S3)。根据前驱图,P3进程运行前需要等待P1进程的结果,故需执行程序前要先利用1个P操作,而P3进程运行结束需要通知P5进程。根据排除法可选项只有选项B和选项C。又因为P3进程运行结束后需要利用1个V操作通知P5进程,根据排除法可选项只有选项B满足要求。根据前驱图,P4进程执行结束需要利用1个V操作通知P5进程,故空e处需要1个V操作;P5进程执行前需要等待P3和P4进程的结果,故空f处需要2个P操作。根据排除法可选项只有选项B和选项C能满足要求。根据试题(27)分析可知,P3进程运行结束是利用V(S4)通知P5进程,故P4进程运行结束是利用V(S5)通知P5进程。
答案:B解析:根据前驱图,P1进程执行完需要通知P2和P3进程,故需要利用V(S1)V(S2)操作通知P2和P3进程,所以空a应填V(S1)V(S2);P2进程执行完需要通知P4进程,所以空b应填V(S3)。根据前驱图,P3进程运行前需要等待P1进程的结果,故需执行程序前要先利用1个P操作,而P3进程运行结束需要通知P5进程。根据排除法可选项只有选项B和选项C。又因为P3进程运行结束后需要利用1个V操作通知P5进程,根据排除法可选项只有选项B满足要求。根据前驱图,P4进程执行结束需要利用1个V操作通知P5进程,故空e处需要1个V操作;P5进程执行前需要等待P3和P4进程的结果,故空f处需要2个P操作。根据排除法可选项只有选项B和选项C能满足要求。根据试题(27)分析可知,P3进程运行结束是利用V(S4)通知P5进程,故P4进程运行结束是利用V(S5)通知P5进程。
-
第17题:
6进程P1、P2、P3、P4和P5的前趋图如下所示:
若用PV操作控制进程P1、P2、P3、P4和P5并发执行的过程,则需要设置5个信号量S1、S2、S3、S4、S5,且信号量S1~S5的初值都等于零。下图中c和d分别应填写( )。
 A.P(S2)和P(S4)
A.P(S2)和P(S4)
B.P(S2)和V(S4)
C.V(S2)和P(S4)
D.V(S2)和V(S4)答案:B解析:参考课程有关内容。1、先在图中标注信号量 2、遵循P前面的信号量,V后面的信号量的原则。 -
第18题:
假设系统中有三类互斥资源R1、R2和R3,可用资源数分别为10、5和3。在T0时刻系统中有P1、P2、P3、P4和P5五个进程,这些进程对资源的最大需求量和已分配资源数如下表所示,此时系统剩余的可用资源数分别为( )。如果进程按(请作答此空)序列执行,那么系统状态是安全的。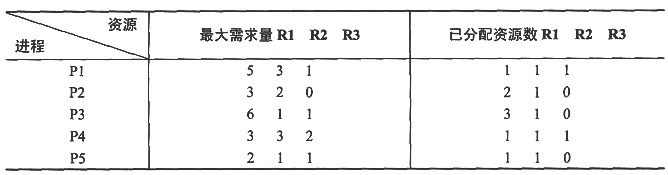 A.P1→P2→P4→P5→P3
A.P1→P2→P4→P5→P3
B.P5→P2→P4→P3→P1
C.P4→P2→P1→P5→P3
D.P5→P1→P4→P2→P3答案:B解析:初始时系统的可用资源数分别为10、5和3。在T0时刻已分配资源数分别为8、5和2,因此系统剩余的可用资源数分别为2、0和1。安全状态是指系统能按某种进程顺序(P1,P2,…,Pn),来为每个进程Pi分配其所需的资源,直到满足每个进程对资源的最大需求,使每个进程都可以顺利完成。如果无法找到这样的一个安全序列,则称系统处于不安全状态。本题进程的执行序列已经给出,我们只需将四个选项按其顺序执行一遍,便可以判断出现死锁的三个序列。
P1→P2→P4→P5→P3是不安全的序列。因为在该序列中,进程P1先运行,P1尚需资源数为(4,2,0),假设将资源R1分配2台给进程P1,则系统剩余的可用资源数为(0,0,1),将导致系统所有的进程都不能作上能完成标志"True"。P5→P2→P4→P3→P1是安全的序列。因为所有的进程都能作上能完成标志"True",如下表所示。
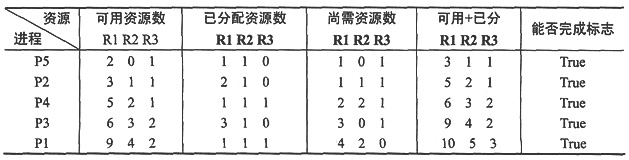
P5→P2→P4→P3→P1具体分析如下:①进程P5运行,系统剩余的可用资源数为(2,0,1),P5尚需资源数为(1,0,1),系统可进行分配,故进程P5能作上能完成标志"True",释放P5占有的资源数(1,1,0),系统可用资源数为(3,1,1)。②进程P2运行,系统剩余的可用资源数为(3,1,1),P2尚需资源数为(1,1,1),系统可进行分配,故进程P2能作上能完成标志"True",释放P2占有的资源数(2,1,0),系统可用资源数为(5,2,1)。③进程P4运行,系统剩余的可用资源数为(5,2,1),P4尚需资源数为(2,2,1),系统可进行分配,故进程P4能作上能完成标志"True",释放P4占有的资源数(1,1,1),系统可用资源数为(6,3,2)。④进程P3运行,系统剩余的可用资源数为(6,3,2),P3尚需资源数为(3,0,1),系统可进行分配,故进程P3能作上能完成标志"True",释放P3占有的资源数(3,1,0),系统可用资源数为(9,4,2)。⑤进程P1运行,系统剩余的可用资源数为(9,4,2),P1尚需资源数为(4,2,0),系统可进行分配,故进程P1能作上能完成标志"True",释放P1占有的资源数(1,1,1),系统可用资源数为(10,5,3)。P4→P2→P1→P5→P3是不安全的序列。因为在该序列中,进程P4先运行,P4尚需资源数为(2,2,1),假设将资源R1分配2台给进程P4,则系统剩余的可用资源数为(0,0,1),将导致系统所有的进程都不能作上能完成标志"True"。P5→P1→P4→P2→P3是不安全的序列。因为在该序列中,进程P5先运行,系统剩余的可用资源数为(2,0,1),P5尚需资源数为(1,0,1),系统可进行分配,故进程P5能作上能完成标志"True",释放P5占有的资源数(1,1,0),系统可用资源数为(3,1,1)。进程P1运行,P1尚需资源数为(4,2,0),假设将资源R1分配3台给进程P1,则系统剩余的可用资源数为(0,1,1),将导致系统中的进程P1、P2、P3和P4都不能作上能完成标志"True"。 -
第19题:
进程P1、P2、P3、P4、P5和P6的前趋图如下所示: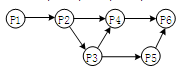
若用PV操作控制这6个进程的同步与互斥的程序如下,那么程序中的空①和空②处应分别为(48) A.V(S1)和P(S2)
A.V(S1)和P(S2)
B.P(S1)和V(S2)
C.V(S1)和V(S2)
D.V(S2)和P(S1)答案:B解析:(48)根据前驱图,P2进程需要等待P1进程的通知,故需要利用P(S1)操作测试P1进程是否运行完,所以空①应填P(S1),P2进程运行结束需要利用V操作分别通知P3、P4进程,由于P3进程执行前已经用P(S2),所以空②应填V(S2)。 -
第20题:
前趋图是一个有向无环图,记为:→=(P i ,P j )|P i 完成时间先于 P j 开始时间}。假设系统中进程 P=(P 1 ,P2, P3, P 4 , P 5 ,P 6 , P 7 ,P 8 }且进程的前趋图如下: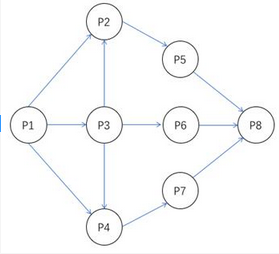
那么,该前驱图可记为()。A.→={(P1,P2),(P1,P3),(P1,P4 ),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P8),(P5,P6),(P7,P8)}
B.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P8),(P6,P8),(P7,P8)}
C.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P5),(P4,P6),(P4,P7),(P6,P8),(P7,P8)}
D.→={(P1,P2),(P1,P3),(P1,P4),(P2,P5),(P3,P2),(P3,P4),(P3,P5),(P4,P6),(P4,P7),(P7,P8),(P6,P8)}答案:B解析:P1有三个紧后P2、P3、P4;P8有三个紧前P5、P6、P7,只有B选项符合。 -
第21题:
进程P1、P2、P3、P4、P5和P6的前趋图如下所示: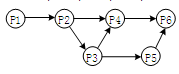
若用PV操作控制这6个进程的同步与互斥的程序如下,空③和空④处应分别为(49)。 A.V(S4)V(S5)和P(S3)
A.V(S4)V(S5)和P(S3)
B.P(S4)P(S5)和V(S3)
C.V(S3)V(S4)和V(S5)
D.P(S3)V(S4)和P(S3)答案:A解析:(49)根据前驱图,P3进程运行结束需要利用两个V操作分别通知P4、P5进程,故空③应为两个V操作;又由于P4执行前需要等待进程P2、P3的结果,需要2个P操作,而P4进程的程序中执行前只有1个P操作,故空④应为1个P操作。采用排除法,对于试题(49)的选项A、选项B、选项C和选项D中,只有选项A满足条件。 -
第22题:
进程P1、P2、P3、P4、P5和P6的前趋图如下所示:
若用PV操作控制这6个进程的同步与互斥的程序如下,空d和空e处应分别为(47)。 A.V(S3)V(S4)和V(S6)
A.V(S3)V(S4)和V(S6)
B.P(S3)P(S4)和V(S6)
C.P(S3)V(S4)和V(S6)
D.P(S3)V(S4)和P(S6)答案:B解析:对于试题(47),根据前驱图P4进程开始运行前必须等待P2和P3进程的通知,需要用P (S3)操作测试P2进程是否运行完,用P (S4)操作测试P3进程是否运行完,所以空d应填P (S3) P (S4), P4进程运行结束需要利用V (S6)操作通知P5进程,所以空e应填V (S6)。 -
第23题:
前趋图是一个有效无环图,记为-={pi,pj,pi完成时间先于pj开始时间}。假设系统中进P={p1,p2,p3,p4,p5,p6,p7,p8},且进程的前趋图如下。那么该前驱图可记为(请作答此空)图中( )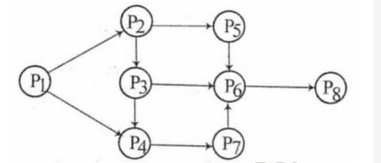
 A.-={(P1,P2),(P1,P3),(P1,P4)(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P6)
A.-={(P1,P2),(P1,P3),(P1,P4)(P2,P5),(P3,P2),(P3,P4),(P3,P6),(P4,P7),(P5,P6)
B.-={(P1,P2),(P1,P4),(P2,P3)(P2,P5),(P3,P4),(P3,P6),(P4,P7),(P5,P6),(P6,P8)(p7,p6)}
C.-={(P1,P2),(P1,P4),(P2,P5)(P3,P2),(P3,P4),(P3,P6),(P4,P6),(P4,P7),(P6,P8)(p7,p8)}
D.-={(P1,P2),(P1,P3),(P2,P4)(P2,P5),(P3,P2),(P3,P4),(P3,P5),(P4,P7),(P6,P8)(p7,p8)}答案:B解析:本题考查前趋图相关知识。前趋图标记规则:从小到大。使用排除法,解题思路如下:1)A选项,(P5,P8)不存在,排除2)C选项,(P2,P3)缺失,排除3)D选项,(P2,P4)不存在,排除4)只剩下B选项,经检验,正确。观察B选项,共有10对前驱关系,P1为初始节点,P8为终止节点。